















Holybro Pixhawk 6X (Rev8)
Holybro Pixhawk 6X (Rev8) – profesjonalny autopilot dla zaawansowanych UAV i systemów autonomicznych
Zbudowany w oparciu o najnowszą, otwartą architekturę Pixhawk FMUv6X, Holybro Pixhawk 6X (Rev8) łączy wydajny procesor STM32H753 z potrójnie redundantnymi układami IMU ICM-45686 z technologią BalancedGyro™, dwoma barometrami oraz zaawansowaną izolacją drgań, co zapewnia wyjątkową stabilność i niezawodność lotu. Wersja Rev8 wprowadza ulepszone czujniki oraz udoskonalony system izolacji w porównaniu do wcześniejszych generacji, zapewniając dokładniejsze dane lotu i lepszą wydajność w wymagających warunkach. Dzięki łączności Ethernet, CAN FD, UART, I2C i SPI, Pixhawk 6X (Rev8) jest idealną platformą autopilota dla profesjonalnych UAV, autonomicznych pojazdów lądowych oraz projektów robotycznych wymagających wysokiej precyzji, bezpieczeństwa i integracji systemowej.

Najważniejsze cechy konstrukcyjne Holybro Pixhawk 6X (Rev8)
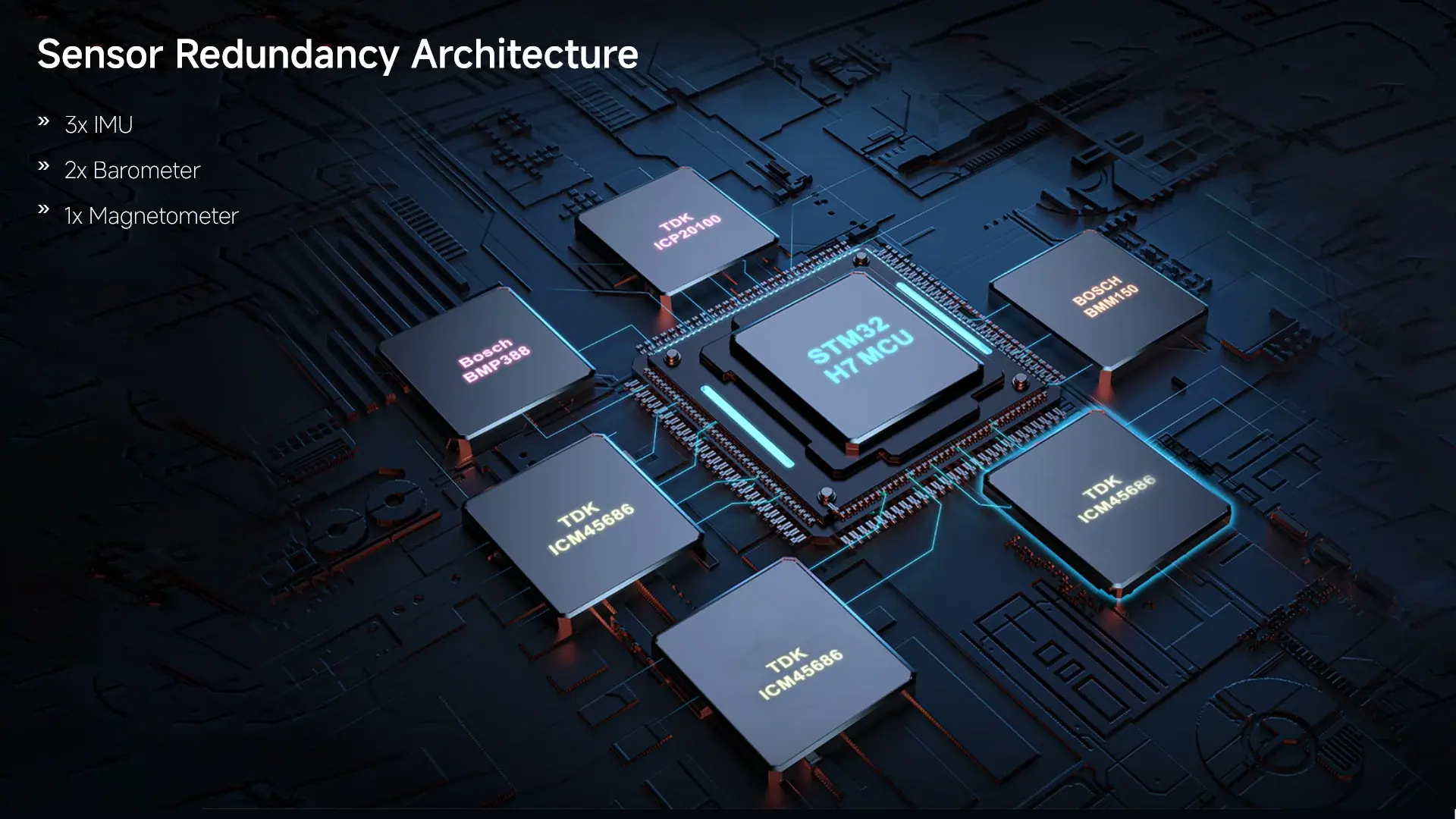
- Redundancja: 3× czujniki IMU ICM-45686 (±32 g) z technologią BalancedGyro™ oraz 2× barometry
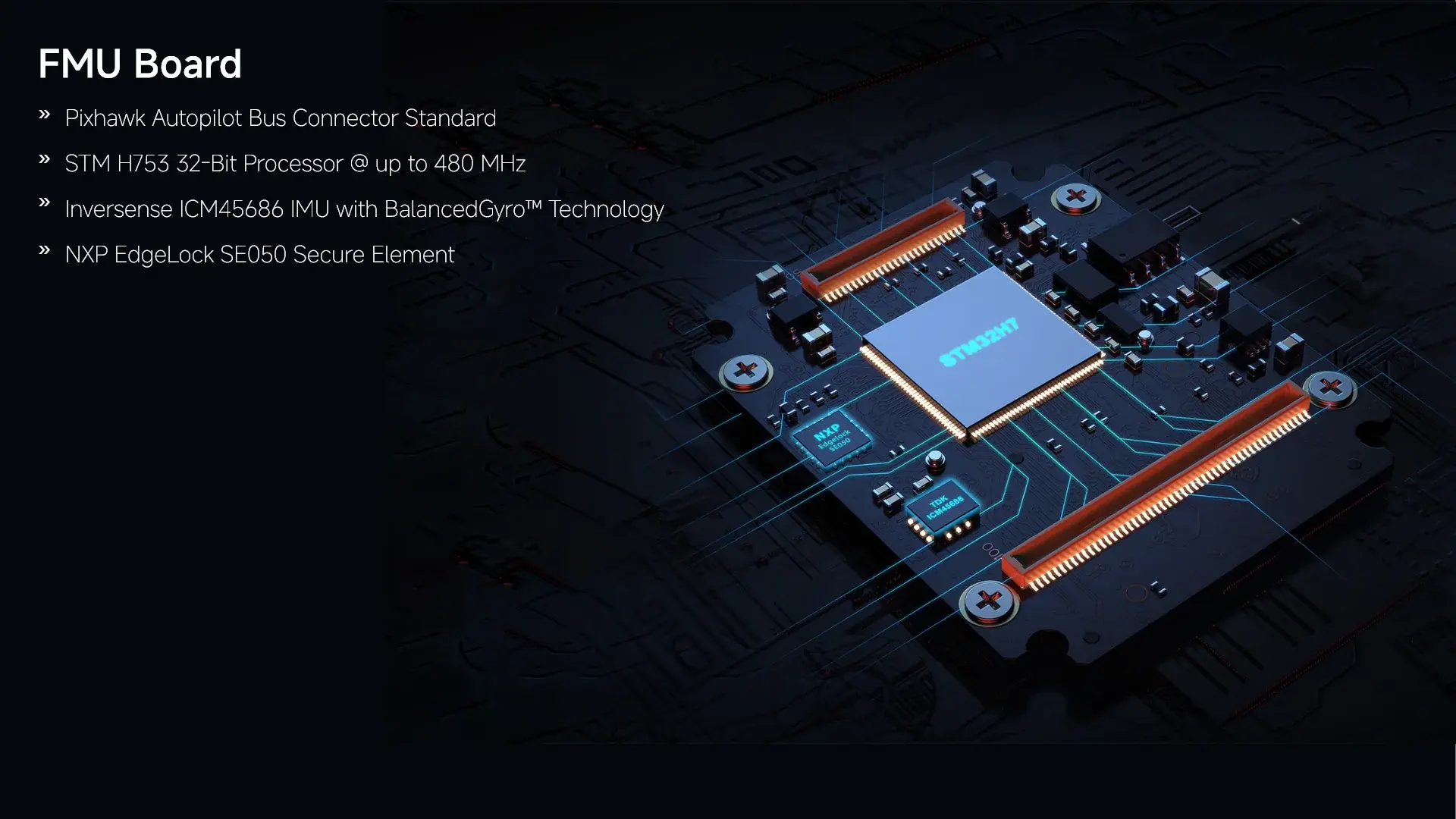
- Wysokowydajny procesor STM32H753 o taktowaniu do 480 MHz
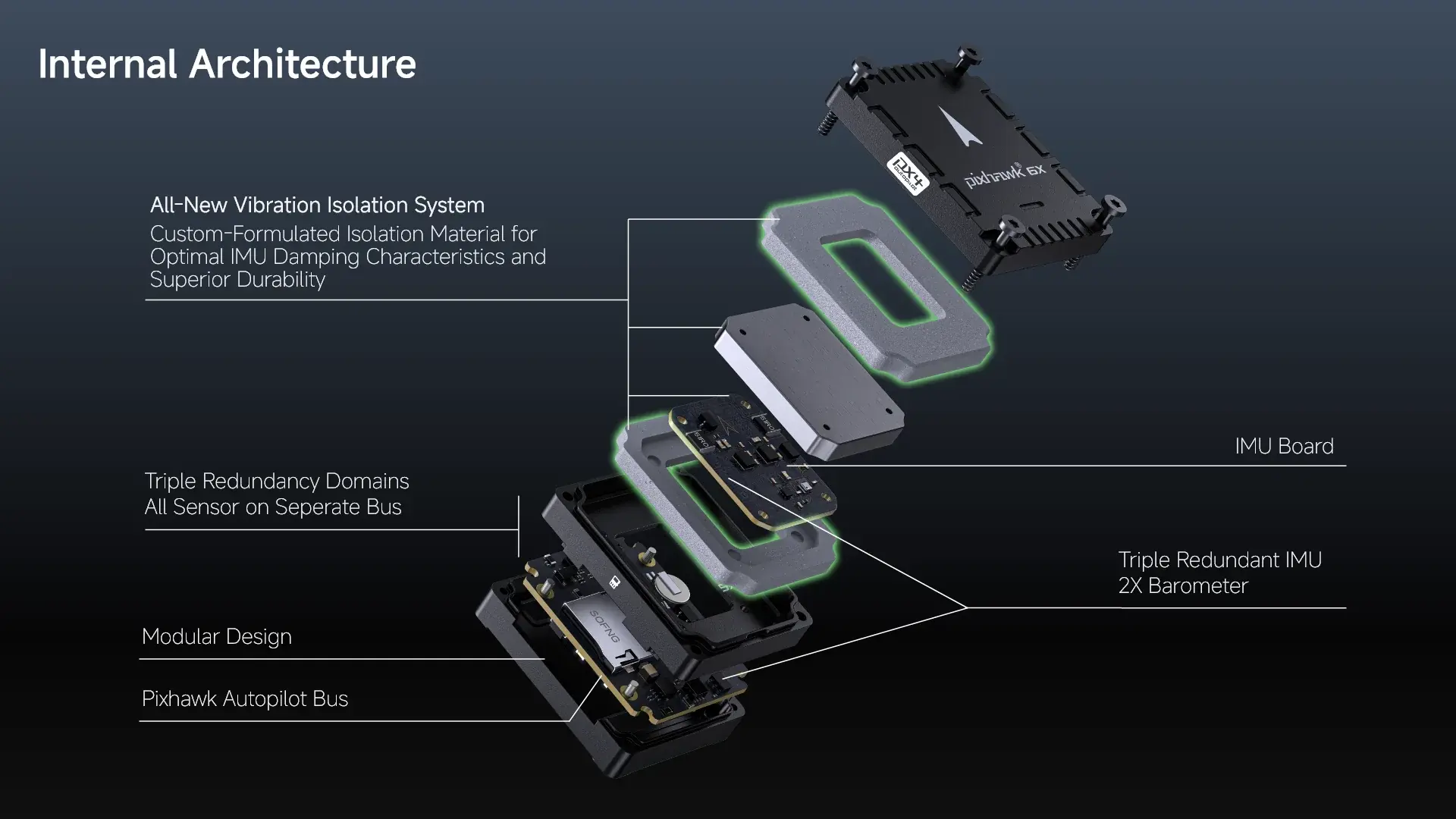
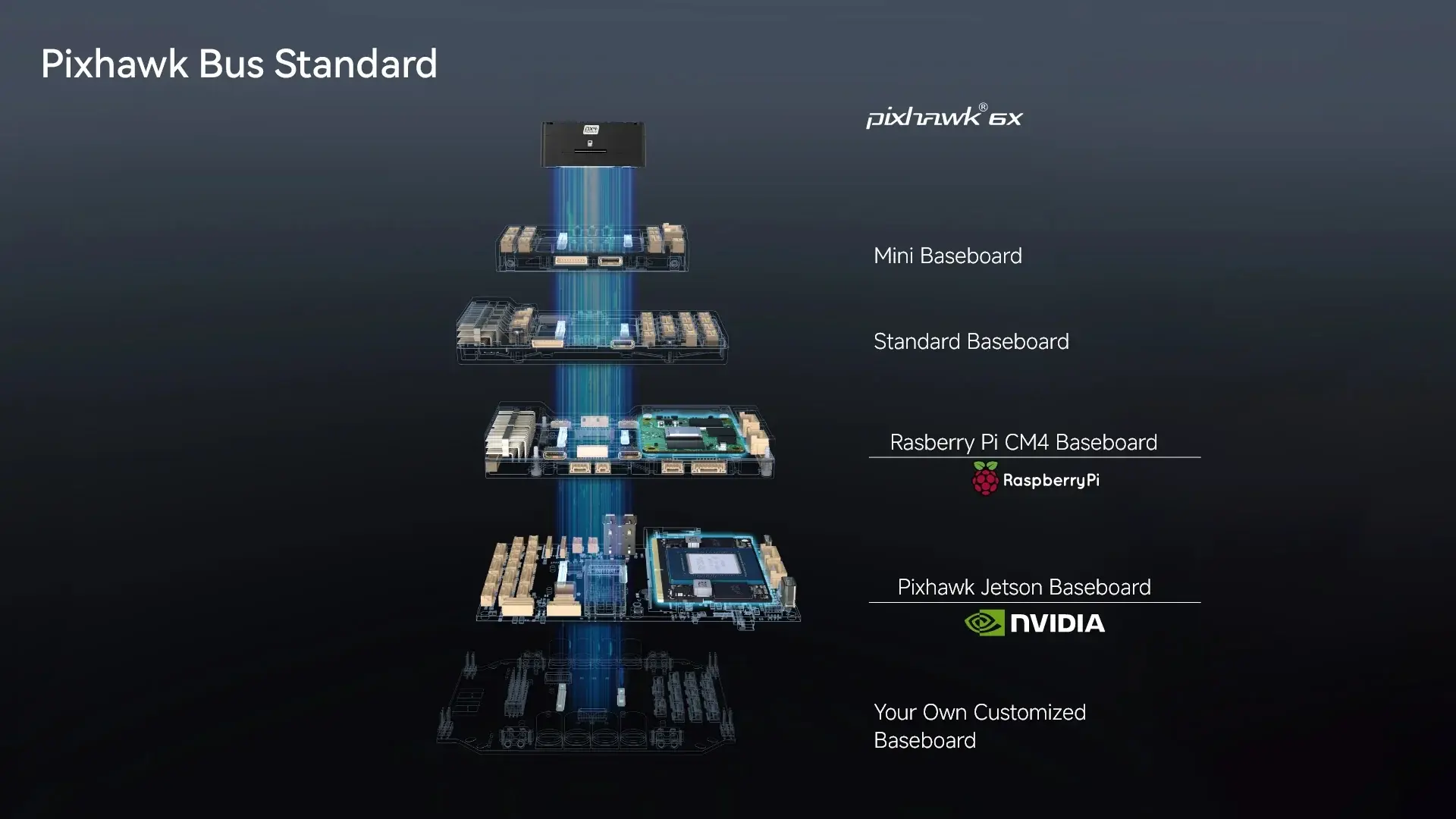
- Modułowa konstrukcja kontrolera lotu: oddzielne moduły IMU, FMU i Base połączone przez złącza Pixhawk Bus 100-pin i 50-pin
- Potrójna redundancja domen: całkowicie odizolowane domeny czujników z osobnymi magistralami i niezależnym zasilaniem
- Nowy, zaawansowany materiał izolacji drgań o wysokiej częstotliwości rezonansowej
- Interfejs Ethernet do szybkiej integracji z komputerem misji; możliwa praca bez transformatora przy użyciu rezystorów terminujących 50 Ω po stronie urządzenia docelowego (AN2190 50 Ω termination)
- IMU z kontrolą temperatury, zapewniające optymalne warunki pracy czujników
- Programowo przełączane tryby sygnału 3,3 V lub 5 V (wymagana modyfikacja Baseboarda)
- Obsługa cyfrowych modułów zasilania dla dokładniejszych pomiarów napięcia i prądu
Ostrzeżenie: kontrolery lotu Pixhawk 6X nie obsługują analogowych modułów zasilania.
Nowa konstrukcja systemu izolacji drgań
Nowy system izolacji drgań wykorzystuje specjalnie opracowany, trwały materiał silikonowy zamiast tradycyjnej pianki tłumiącej. Dzięki szeroko zakrojonym pracom badawczo-rozwojowym oraz testom zapewnia optymalną charakterystykę tłumienia drgań dla modułu IMU, przy jednoczesnym utrzymaniu wysokiej częstotliwości rezonansowej. Rozwiązanie to idealnie sprawdza się w dronach przemysłowych i komercyjnych.

Uwaga
Wersja Rev8 jest wspierana od wydania PX4 1.14.3 lub nowszego oraz ArduPilot 4.5.0 lub nowszego. Domyślnie dostarczana jest z oprogramowaniem PX4, ale można również wgrać ArduPilot przez Mission Planner lub QGroundControl.
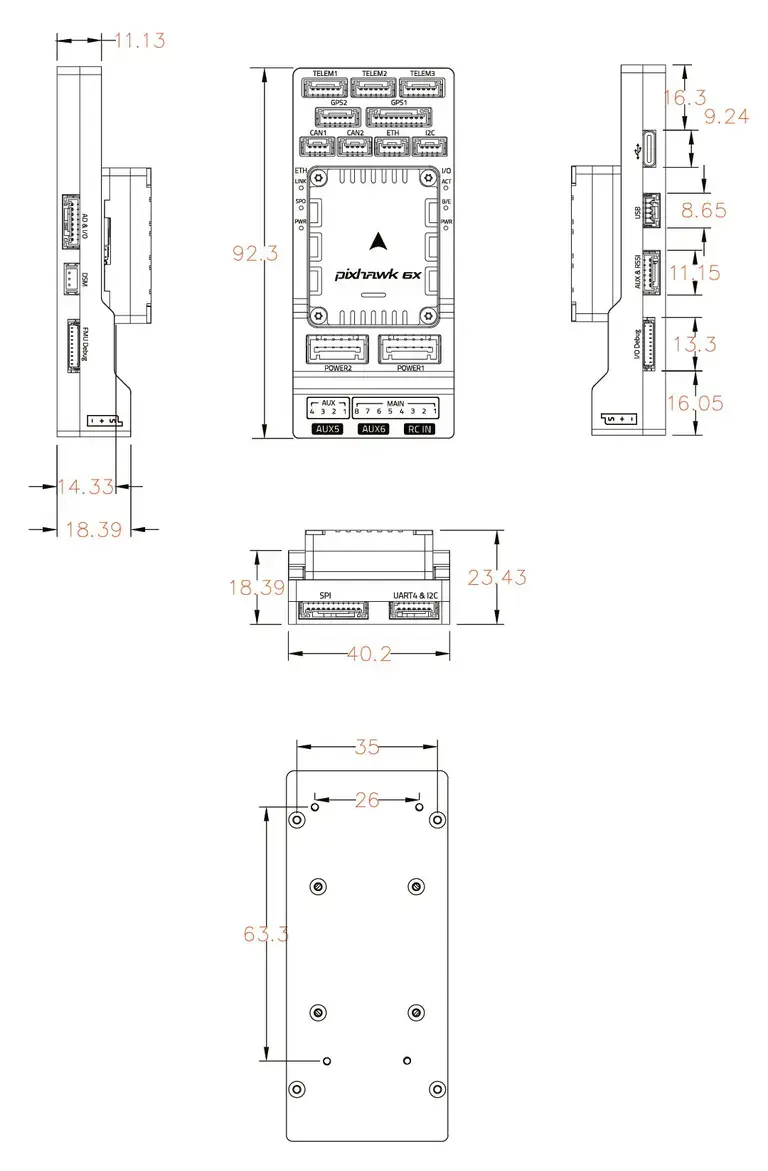
Interfejsy Holybro Pixhawk 6X (Rev8)
- 16 wyjść PWM do serwomechanizmów z programowo przełączanym trybem sygnału 3,3 V lub 5 V (wymagana modyfikacja Baseboarda)
- Wejście R/C dla odbiorników Spektrum / DSM
- Dedykowane wejście R/C dla sygnałów PPM i S.Bus
- Dedykowane wejście analogowe / PWM RSSI oraz wyjście S.Bus
- 4 uniwersalne porty szeregowe
- 3 z pełną kontrolą przepływu
- 1 z ograniczeniem prądu 1,5 A (Telem1)
- 1 port z I2C oraz dodatkową linią GPIO dla zewnętrznego czytnika NFC
- 2 porty GPS
- 1 pełny port GPS z portem Safety Switch
- 1 podstawowy port GPS
- 1 port I2C
- 1 port Ethernet
- Zastosowania beztransformatorowe (AN2190 50 Ohm Termination)
- Przepustowość 100 Mb/s
- 1 magistrala SPI
- 2 linie chip select
- 2 linie data-ready
- 1 linia SPI SYNC
- 1 linia reset SPI
- 2 magistrale CAN dla urządzeń CAN
- CAN obsługuje indywidualne tryby ciche lub sterowanie ESC RX-MUX
- 2 wejścia zasilania z SMBus
- 1 port AD i IO
- 2 dodatkowe wejścia analogowe
- 1 wejście PWM/Capture
- 2 dedykowane linie debugowania i GPIO
Linki referencyjne
Przewodnik konfiguracji modułu zasilania
Przykładowy schemat okablowania
Najnowsze informacje o wspieranym oprogramowaniu.
Specyfikacja Holybro Pixhawk 6X (Rev8)
Procesory i czujniki | |
Procesor FMU | STM32H753 |
Procesor IO | STM32F103 |
(Rev8) Akcelerometr / Żyroskop | 3x ICM-45686 (z technologią BalancedGyro™) |
(Rev8) Barometr | ICP20100 i BMP388 |
(Rev8) Magnetometr | BMM150 |
Element zabezpieczający | NXP EdgeLock SE050 Plug & Trust (sprzętowy element bezpieczeństwa / układ kryptograficzny) |
Parametry elektryczne | |
Maksymalne napięcie wejściowe | 6 V |
Zasilanie USB | 4,75–5,25 V |
Zasilanie szyny serw | 0–36 V |
Limit prądu Telem1 i GPS2 | 1,5 A |
Limit prądu pozostałych portów | 1,5 A |
Napięcie sygnału PWM | domyślnie 3,3 V (możliwość zmiany na 5 V po modyfikacji rezystora na płycie) |
Temperatura pracy | -25°C do 85°C |
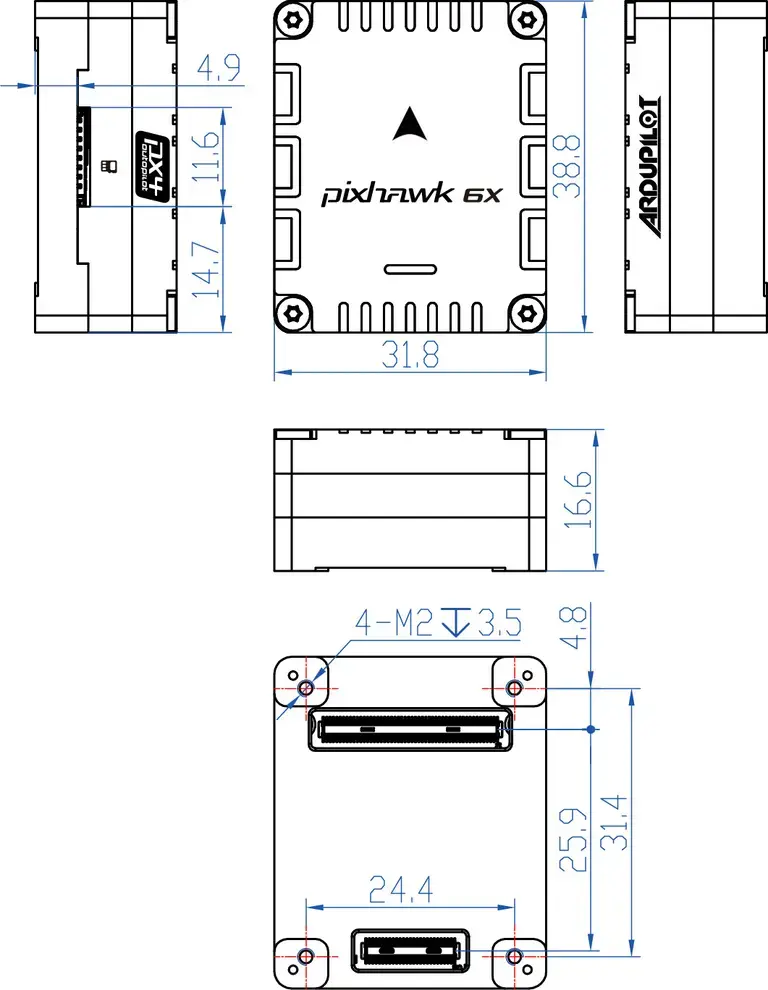
Dane mechaniczne | |
Wymiary | moduł kontrolera lotu: 38,8 × 31,8 × 16,8 mm standardowy Baseboard: 52,4 × 102 × 16,7 mm (aluminium) |
Masa | moduł kontrolera lotu: 31,3 g Baseboard: 72,5 g (aluminium) |
Więcej o Module zasilania Holybro PM02D 12S
Zawartość zestawu Holybro Pixhawk 6X (Rev8) (FC Module Only)
- 1x Pixhawk 6X Flight Controller Module
Zawartość zestawu Holybro Pixhawk 6X (Rev8) (Standard v2A)
- 1x Pixhawk 6X Flight Controller Module
- 1x Standardowy Baseboard v2A
- 1x Zestaw przewodów
Zawartość zestawu Holybro Pixhawk 6X (Rev8) (with PM02D)
- 1x Pixhawk 6X Flight Controller Module
- 1x Standardowy Baseboard v2A
- 1x Zestaw przewodów
- 1x Moduł zasilania PM02D 12S